 電子發(fā)燒友App
電子發(fā)燒友App


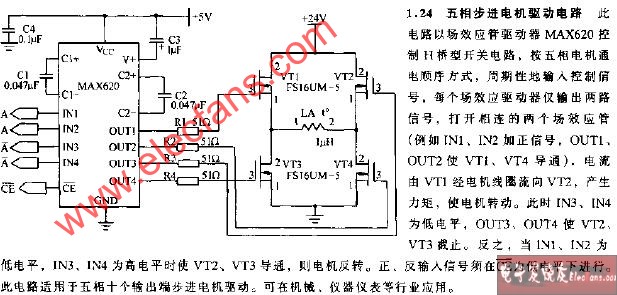
四相步進(jìn)電機(jī)功率驅(qū)動電路
- 步進(jìn)電機(jī)(145254)
- 功率(68169)
- 四相(6353)


相關(guān)推薦
基于AT89C2051的四相步進(jìn)電機(jī)驅(qū)動器電路設(shè)計
,經(jīng)74LS14反相后進(jìn)入9014,經(jīng)9014放大后控制光電開關(guān),光電隔離后,由功率管TIP122將脈沖信號進(jìn)行電壓和電流放大,驅(qū)動步進(jìn)電機(jī)的各相繞組。使步進(jìn)電機(jī)隨著不同的脈沖信號分別作正轉(zhuǎn)、反轉(zhuǎn)
2008-10-21 00:38:58
五線四相步進(jìn)電機(jī)驅(qū)動測試程序(2個步進(jìn)電機(jī))
五線四相步進(jìn)電機(jī)驅(qū)動測試程序(2個步進(jìn)電機(jī))
2023-03-22 14:18:40 6
6
6python控制步進(jìn)電機(jī)轉(zhuǎn)動
硬件選擇與設(shè)計 不管是直流電機(jī)還是步進(jìn)電機(jī),如果想要讓其進(jìn)行正常的轉(zhuǎn)動,必須需要驅(qū)動器進(jìn)行驅(qū)動,所以我們在這里選擇的步進(jìn)電機(jī)和驅(qū)動板型號分別為28BYJ-48-5V和UL2003芯片的五線四相步進(jìn)
2023-03-22 10:48:530
0步進(jìn)電機(jī)驅(qū)動原理及選型
四相/四線兩相(兩種型號的步進(jìn)電機(jī)驅(qū)動器不能通用,所以購買驅(qū)動器之前要確定型號) 2.電機(jī)尺寸: 3.重量: 4.帶載能力: 5.驅(qū)動電流:行業(yè)內(nèi)步進(jìn)電機(jī)的額定電流都是指電流峰值,實際工作電流不一定是額定電流驅(qū)動,42步進(jìn)電機(jī)及以 下尺寸一般小于1A;
2023-03-20 14:22:272
2步進(jìn)電機(jī)的驅(qū)動與控制 三相步進(jìn)電機(jī)的驅(qū)動電路
根據(jù)我讀的《步進(jìn)電機(jī)應(yīng)用技術(shù)》這本書,進(jìn)行的學(xué)習(xí)過程中的知識記錄和心得體會的記錄。
前言
基本信息
前言說明
三相步進(jìn)電機(jī)的驅(qū)動電路
三相電機(jī)的驅(qū)動方式
三相步進(jìn)電機(jī)用驅(qū)動器 I C IC IC
2023-03-20 11:46:355
5兩相四線步進(jìn)電機(jī)與LMD18200驅(qū)動器與電機(jī)加速減速
兩相四線步進(jìn)電機(jī)1.工作功率條件電壓12V直流電流,靜態(tài)電流
2023-03-20 11:27:392
2ESP8266驅(qū)動五線四相步進(jìn)電機(jī)
一.系統(tǒng)概述 使用ESP8266作為主控,驅(qū)動是ULN2003A,驅(qū)動五線四相步進(jìn)電機(jī)。 (1)五相步進(jìn)電機(jī)工程圖 (2)驅(qū)動電路原理圖 ? ? 二.代碼部分 #define D1 5#define
2023-03-20 10:46:510
0二相四線制步進(jìn)電機(jī)驅(qū)動原理與Proteus仿真
四線制步進(jìn)電機(jī) 1. 技術(shù)指標(biāo)(1)相數(shù):電機(jī)內(nèi)部的線圈組數(shù)。(2)拍數(shù):完成一個磁場周期性變化所需要脈沖數(shù)或?qū)щ姞顟B(tài)。兩相四線電機(jī)可以使用單四拍、雙四拍和八拍的方式驅(qū)動。(3)步距角:磁場變化一次電機(jī)
2023-03-17 14:57:055
5步進(jìn)電機(jī)驅(qū)動電路和控制電路簡述
按照預(yù)定的順序精確地旋轉(zhuǎn)。這種電路通常包括一個控制器和一些功率驅(qū)動器。控制器接受主電路或計算機(jī)的指令,并將其轉(zhuǎn)換為細(xì)分脈沖信號,送到功率驅(qū)動器。功率驅(qū)動器則將信號轉(zhuǎn)換為電機(jī)所需的電流和電壓信號,從而控制電機(jī)的旋轉(zhuǎn)速度和精度。常見的步進(jìn)電機(jī)驅(qū)動電路包括雙H橋驅(qū)動電路、單H橋驅(qū)動電路、混合式驅(qū)動電路等。
2023-03-13 17:06:44 1726
1726
1726雙極步進(jìn)電機(jī)和單極步進(jìn)電機(jī)之間差異
與兩相雙極步進(jìn)電機(jī)的驅(qū)動電路相比,兩相單極步進(jìn)電機(jī)的驅(qū)動電路在輸入段配置、內(nèi)部邏輯及控制電路和驅(qū)動電路使用雙通道方面基本相同,但是輸出段的配置不同。兩相雙極步進(jìn)電機(jī)使用雙通道H橋來驅(qū)動,而兩相單極步進(jìn)電機(jī)則使用雙通道的2個開關(guān)(MOSFET)來驅(qū)動。
2023-03-10 09:18:46769
769
步進(jìn)電機(jī)驅(qū)動教程_步進(jìn)電機(jī)功率計算
步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過輸入脈沖信號來控制它的位置和運動。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動電路組成,驅(qū)動電路負(fù)責(zé)將輸入的脈沖信號轉(zhuǎn)換為電機(jī)的運動控制信號。
2023-03-08 14:33:332204
2204兩相雙極步進(jìn)電機(jī)的驅(qū)動 其1
兩相雙極步進(jìn)電機(jī)的驅(qū)動:驅(qū)動電路,先來看兩相雙極驅(qū)動電路的基本框圖示例??墒褂秒p通道的H橋驅(qū)動電路來驅(qū)動兩相雙極步進(jìn)電機(jī)。
2023-02-24 09:51:11734
734
兩相雙極步進(jìn)電機(jī)的驅(qū)動 其2
在上一篇文章“兩相雙極步進(jìn)電機(jī)的驅(qū)動 其1”中,給出了兩相雙極步進(jìn)電機(jī)的基本驅(qū)動電路示例和驅(qū)動波形。此次“兩相雙極步進(jìn)電機(jī)的驅(qū)動 其2”篇,將介紹驅(qū)動兩相雙極步進(jìn)電機(jī)過程中電流再生時的Decay:電流衰減。
2023-02-24 09:51:11986
986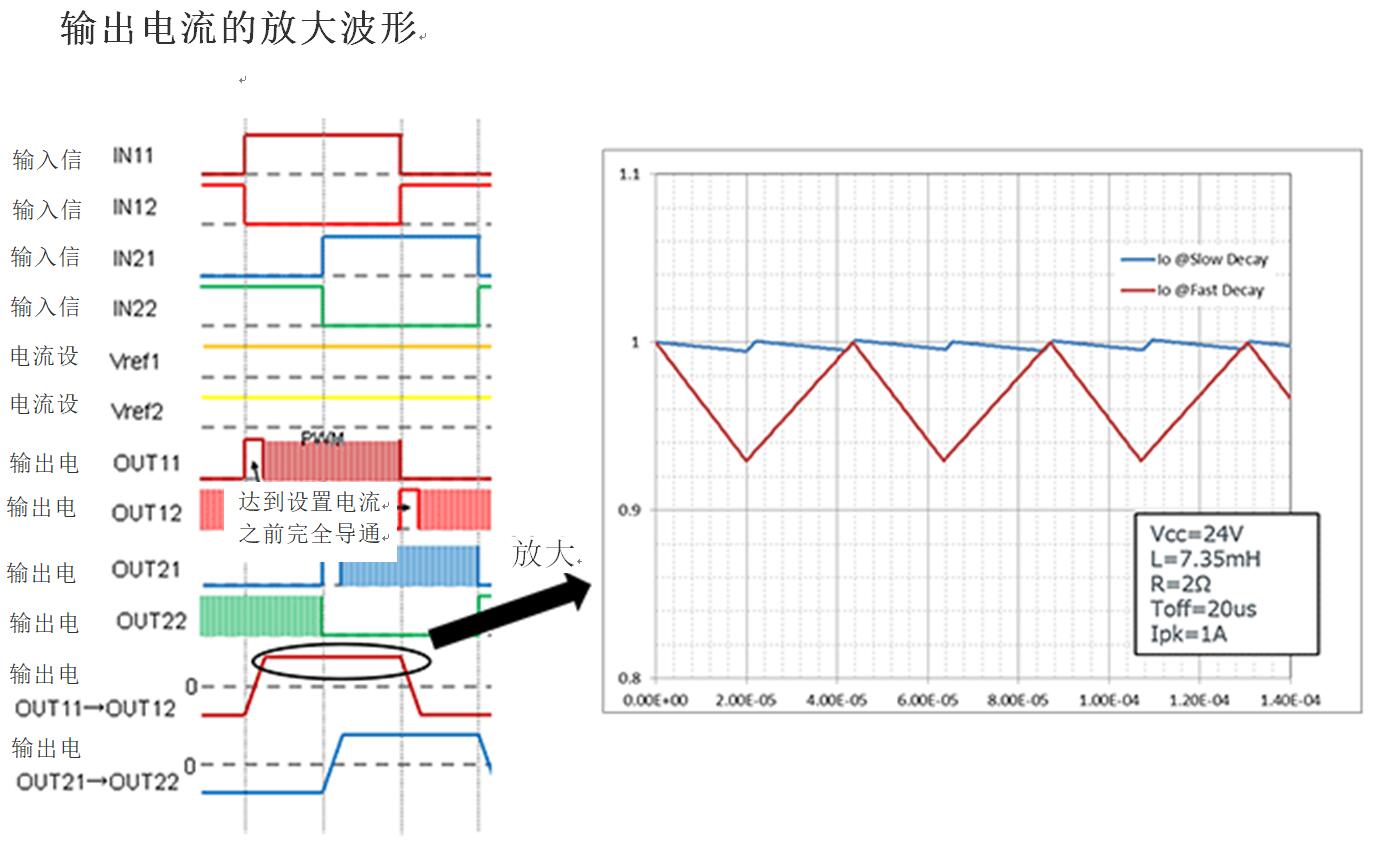
兩相單極步進(jìn)電機(jī)的驅(qū)動電路
繼上一篇“兩相雙極步進(jìn)電機(jī)的驅(qū)動”之后,本文將從兩相單極步進(jìn)電機(jī)的驅(qū)動電路,兩相單極步進(jìn)電機(jī)的兩相勵磁PWM驅(qū)動波形兩個方面來介紹“兩相單極步進(jìn)電機(jī)的驅(qū)動”。如欲了解有關(guān)雙極步進(jìn)電機(jī)和單極步進(jìn)電機(jī)之間差異的更多信息,請參考這里。
2023-02-24 09:51:111477
1477
分享六種步進(jìn)電機(jī)驅(qū)動電路
BYG通用系列二相步進(jìn)電機(jī)最常采用的單極性和雙極性2種驅(qū)動電路的設(shè)計方案。從原理上體現(xiàn)了二相步進(jìn)電機(jī)的控制方法,增加了步進(jìn)電機(jī)驅(qū)動電路設(shè)計的靈活性。二相步進(jìn)電機(jī)的單極性和雙極性2種驅(qū)動電路設(shè)計都采用
2023-01-15 17:17:252946
294651驅(qū)動兩相四線步進(jìn)電機(jī)
一、步進(jìn)電機(jī)概念二、步進(jìn)電機(jī)原理三、步進(jìn)電機(jī)工作方式四、ULN2003五、具體程序示例
2021-12-01 11:21:1155
55步進(jìn)電機(jī)-STM32單片機(jī)控制四相五線步進(jìn)電機(jī)的程序
單片機(jī)控制步進(jìn)電機(jī)的方法很簡單,可以用IO口輸出脈沖控制線圈電流驅(qū)動電機(jī)旋轉(zhuǎn),可分為四相四拍,四相八拍。四相電機(jī),有四相四拍運行方式AB-BC-CD-DA-AB,四相八拍運行方式即
2021-11-15 15:51:0250
50二相步進(jìn)電機(jī)與三相步進(jìn)電機(jī)的區(qū)別
步進(jìn)電機(jī)主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進(jìn)電機(jī)與三相步進(jìn)電機(jī)的區(qū)別: 電機(jī)的相數(shù) 是指電機(jī)內(nèi)部的線圈數(shù)不同,二相步進(jìn)電機(jī)電機(jī)內(nèi)部是由2個線圈
2021-08-03 14:12:5015063
15063二相步進(jìn)電機(jī)與三相步進(jìn)電機(jī)的區(qū)別
步進(jìn)電機(jī)主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進(jìn)電機(jī)與三相步進(jìn)電機(jī)的區(qū)別: 電機(jī)的相數(shù) 是指電機(jī)內(nèi)部的線圈數(shù)不同,二相步進(jìn)電機(jī)電機(jī)內(nèi)部是由2個線圈
2021-07-20 14:32:168312
8312兩相步進(jìn)電機(jī)的雙極連接和單極連接
從本文開始,將介紹兩相雙極步進(jìn)電機(jī)和兩相單極步進(jìn)電機(jī)的驅(qū)動電路,以及兩相雙極步進(jìn)電機(jī)和兩相單極步進(jìn)電機(jī)的驅(qū)動方法。首先介紹雙極連接和單極連接。
2021-06-12 11:55:001941
1941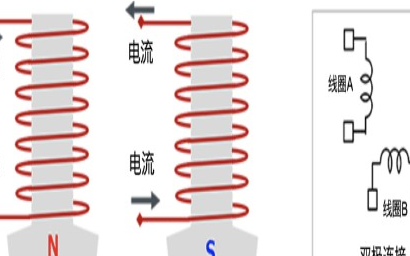
四相步進(jìn)電機(jī)的原理說明
說起四相步進(jìn)電機(jī)相信使用過的人都是有所知情的。四相步進(jìn)電機(jī)的行業(yè)詳情大家或許了解的不多。但是能夠了解四相步進(jìn)電機(jī)的詳情會給四相步進(jìn)電機(jī)的運用帶來便利。
2021-02-12 11:48:0012754
12754小功率4相步進(jìn)電機(jī)的驅(qū)動 及智能驅(qū)動方案
01 小功率4相步進(jìn)電機(jī)的驅(qū)動 下面是一種驅(qū)動電路框圖: 達(dá)林頓管陣列ULN2803分別從鎖存器取出第0,2,4,6位和1,3,5,7位去驅(qū)動兩個步進(jìn)電機(jī).四相步進(jìn)電機(jī)的通電順序可以有幾種:A,B
2020-11-11 14:39:594827
4827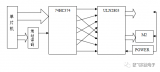
如何進(jìn)行二相步進(jìn)電機(jī)驅(qū)動電路的設(shè)計
介紹了BYG通用系列二相步進(jìn)電機(jī)最常采用的的單極性和雙極性2種驅(qū)動電路的設(shè)計方案,從原理上體現(xiàn)了二相步進(jìn)電機(jī)的控制方法,增加了步進(jìn)電機(jī)驅(qū)動電路設(shè)計的靈活性。二相步進(jìn)電機(jī)的單極性和雙極性2種驅(qū)動
2019-03-04 08:00:0017
17步進(jìn)電機(jī)驅(qū)動電路圖大全(六款二相步進(jìn)電機(jī)/三相反應(yīng)式/LT2221驅(qū)動電路)
本文主要介紹了六款步進(jìn)電機(jī)驅(qū)動電路圖。其中包括了二相步進(jìn)電機(jī)驅(qū)動電路、三相反應(yīng)式步進(jìn)電機(jī)、4線步進(jìn)電機(jī)驅(qū)動電路及LB1836M構(gòu)成步進(jìn)電機(jī)驅(qū)動電路等。
2018-05-23 16:38:3653837
53837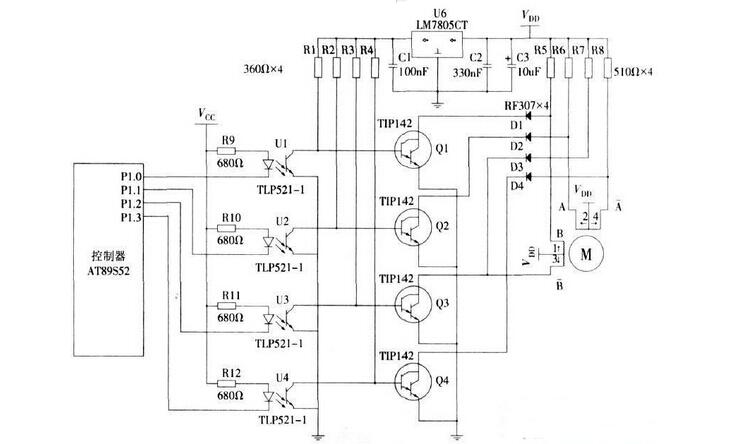
步進(jìn)電機(jī)H橋功率驅(qū)動電路設(shè)計
設(shè)計一種步進(jìn)電機(jī)驅(qū)動電路,使加到電機(jī)繞組上的電流信號前后沿較陡,降低了開關(guān)損耗,改善了電機(jī)的高頻特性,同時具有多種保護(hù)功能.實驗證明,該驅(qū)動電路簡單、可靠并具有優(yōu)良的驅(qū)動性能. H橋功率驅(qū)動電路
2017-12-12 10:44:2528
28基于AVR單片機(jī)的35BYJ46型四相八拍異步電機(jī)驅(qū)動設(shè)計
主要介紹了由AVR 單片機(jī)為核心的四相八拍步進(jìn)電機(jī)的驅(qū)動設(shè)計,并用電路圖、數(shù)據(jù)表格和子程序的方式說明了四相八拍步進(jìn)電機(jī)的硬件驅(qū)動原理和驅(qū)動軟件的設(shè)計實現(xiàn)。采用了35BYJ46型四相八拍步電動機(jī),通過
2016-08-31 16:28:0616
16基于CPLD的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動器設(shè)計
基于CPLD的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動器設(shè)計
2016-04-25 10:54:0934
34基于AVR單片機(jī)的四相步進(jìn)電機(jī)驅(qū)動設(shè)計
基于AVR單片機(jī)的四相步進(jìn)電機(jī)驅(qū)動設(shè)計。
2016-04-25 10:50:4315
15二相步進(jìn)電機(jī)驅(qū)動電路設(shè)計圖
介紹了BYG通用系列二相步進(jìn)電機(jī)最常采用的的單極性和雙極性2種驅(qū)動電路的設(shè)計方案,從原理上體現(xiàn)了二相步進(jìn)電機(jī)的控制方法,增加了步進(jìn)電機(jī)驅(qū)動電路設(shè)計的靈活性。
2014-09-12 17:13:0613447
13447
雙極性步進(jìn)電機(jī)驅(qū)動電路
雙極性步進(jìn)電機(jī)的驅(qū)動電路則如圖2所示,它會使用八顆晶體管來驅(qū)動兩組相位。雙極性驅(qū)動電路可以同時驅(qū)動四線式或六線式步進(jìn)電機(jī),雖然四線式電機(jī)只能使用雙
2010-06-11 09:28:245927
5927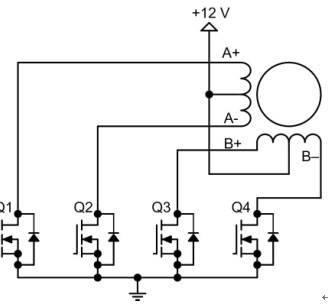
基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動電路設(shè)計
基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動電路設(shè)計摘要:在采用步進(jìn)電機(jī)驅(qū)動的機(jī)構(gòu)中,為了提高定位精度,提出了一種基于FPGA 的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動電路的設(shè)計方案。
2010-05-11 16:09:4150
50
步進(jìn)電機(jī)細(xì)分驅(qū)動電路及原理
步進(jìn)電機(jī)細(xì)分驅(qū)動電路及原理
細(xì)分原理分析
步進(jìn)電機(jī)驅(qū)動線路,如果按照環(huán)形分配器決定的分配方式,
2010-01-09 14:07:5417847
17847
一種小功率步進(jìn)電機(jī)驅(qū)動電路的設(shè)計與實現(xiàn)
一種小功率步進(jìn)電機(jī)驅(qū)動電路的設(shè)計與實現(xiàn): 步進(jìn)電機(jī)驅(qū)動電路的核心部分是環(huán)行脈沖分配器. 本文給出了一種兩相永磁式步進(jìn)電機(jī)驅(qū)動電路的設(shè)計方案. 它包括基于E2PROM和可逆計
2009-09-21 08:38:5180
80

四相步進(jìn)電機(jī)驅(qū)動程序
四相步進(jìn)電機(jī)驅(qū)動電路和驅(qū)動程序
步進(jìn)電機(jī)驅(qū)動器系統(tǒng)電路原理圖
2008-10-21 00:42:206546
6546
實用的步進(jìn)電機(jī)驅(qū)動電路
利用LM331、PMM8713 和SI - 7300A 設(shè)計了四相步進(jìn)電機(jī)驅(qū)動電路,該驅(qū)動電路具有工作可靠、效率高、矩頻特性好的特點,并應(yīng)用于數(shù)控等離子弧壓自動調(diào)高系統(tǒng)中.
步進(jìn)電機(jī)是
2008-08-26 22:44:3064
64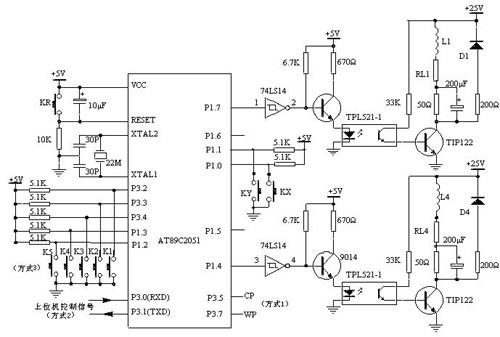
四相步進(jìn)電機(jī)原理圖
四相步進(jìn)電機(jī)原理圖
本文先介紹該步進(jìn)電機(jī)的工作原理,然后介紹了其驅(qū)動器的軟、硬件設(shè)計。
1. 步進(jìn)電機(jī)的工作原理
該步
2008-05-23 17:02:4559833
59833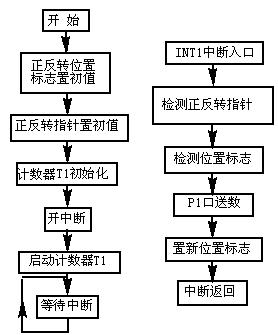



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論