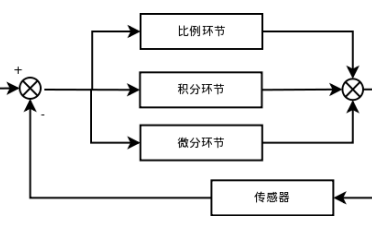
") 兩種實現(xiàn)PID控制的算法的技巧
兩種實現(xiàn)PID控制的算法的技巧

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
PID
+關(guān)注
關(guān)注
37文章
1482瀏覽量
88008 -
控制算法
+關(guān)注
關(guān)注
4文章
170瀏覽量
22245
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
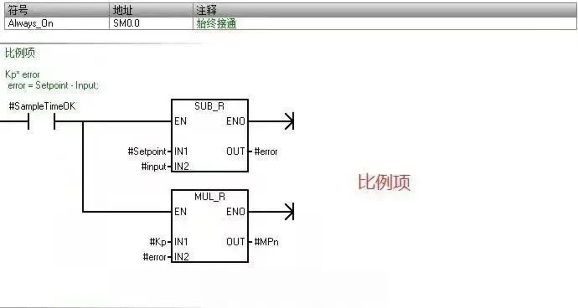
PID控制算法的C語言實現(xiàn):PID算法原理
在工業(yè)應(yīng)用中 PID 及其衍生算法是應(yīng)用最廣泛的算法之一,是當(dāng)之無愧的萬能算法,如果能夠熟練掌握 PID
發(fā)表于 02-26 15:24
模糊PID控制算法如何控制勻速升溫
,誤差較小時采用模糊PID控制,實現(xiàn)了2種控制方法的優(yōu)勢互補(bǔ)。 同時在此基礎(chǔ)上,給出了Fuzzy PID
發(fā)表于 05-30 10:38
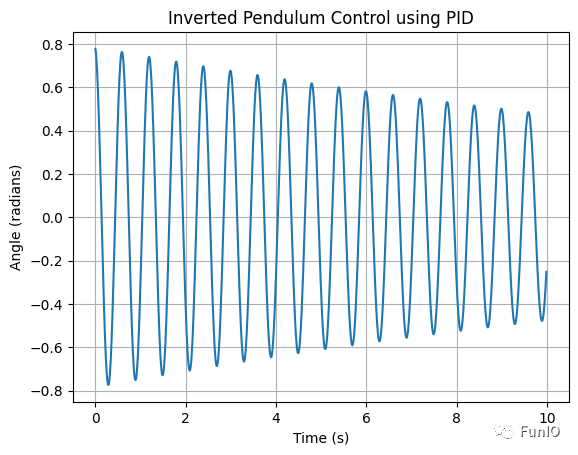
四軸姿態(tài)控制中的PID算法的原理和實現(xiàn)
在自動控制中,PID及其衍生出來的算法是應(yīng)用最廣的算法之一。各個做自動控制的廠家基本都有會實現(xiàn)這
發(fā)表于 06-11 06:00
PID算法與直流電機(jī)的PWM技術(shù)控制相關(guān)資料分享
技術(shù)控制。本文圍繞下面幾個問題展開:什么是PID控制算法? PID控制
發(fā)表于 06-29 08:44
PID算法的代碼實現(xiàn)
目錄一. 緒論二. 角度環(huán)串級PID原理1. PID基本算法2. 姿態(tài)角串級PID原理三. 如何用STM32實現(xiàn)角度-角速度的串級
發(fā)表于 08-17 06:44
兩種典型的ADRC算法介紹
前言??上篇中詳細(xì)闡述了經(jīng)典的自抗擾控制算法的原理,本篇將圍繞兩種ADRC算法展開,針對擴(kuò)張狀態(tài)觀測器的參數(shù)整定問題進(jìn)行詳解,同時,對跟蹤微分器的幾個重要應(yīng)用進(jìn)行介紹。
發(fā)表于 09-07 08:02

如何使用C語言實現(xiàn)PID控制算法
最近兩天在考慮一般控制算法的 C 語言實現(xiàn)問題,發(fā)現(xiàn)網(wǎng)絡(luò)上尚沒有一套完整的比較體系的講解。于是總結(jié)了幾天,整理一套思路分享給大家。 在工業(yè)應(yīng)用中 P
發(fā)表于 09-21 08:00
?7次下載
PID控制算法的C語言實現(xiàn)
、效果展示4、積分分離的PID控制算法4.1、代碼實現(xiàn)4.2、效果圖5、工程文件下載1、PID算法
發(fā)表于 01-13 13:39
?45次下載

如何使用PID控制算法優(yōu)化控制系統(tǒng)
當(dāng)涉及到控制系統(tǒng)中的精確調(diào)節(jié)和穩(wěn)定性,PID(比例-積分-微分)控制算法是一種不可或缺的工具。本文將簡單介紹



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論